A Inteligência Artificial continua a surpreender com avanços que redefinem o que é possível. A NVIDIA Research acaba de revelar uma inovação que promete dar um salto gigantesco na forma como modelos de visão-linguagem (VLMs) interagem com o mundo físico: o NVIDIA SpatialClaw. Este framework inovador e training-free (sem necessidade de treinamento) ataca uma das maiores fraquezas dos VLMs atuais: a dificuldade em compreender com precisão a localização, as relações e o movimento de objetos em ambientes 3D. Em vez de complexos retreinamentos, a solução reside em uma mudança fundamental na interface de ação do agente, usando código como o novo padrão.
NVIDIA SpatialClaw: O Que Aconteceu e Por Que Isso Importa
Enquanto os VLMs têm se mostrado incríveis na compreensão de contexto e geração de texto a partir de imagens, eles ainda tropeçam quando o assunto é o raciocínio espacial puro e simples. Pensar em três dimensões, entender profundidade, distâncias e interações físicas é um desafio. É aqui que o NVIDIA SpatialClaw entra em jogo. Ele foi projetado para capacitar agentes de IA a realizar raciocínio espacial complexo com uma precisão inédita, superando a concorrência em diversos benchmarks e prometendo abrir novas portas para aplicações em robótica, simulações e interfaces humano-máquina.
A grande sacada do SpatialClaw não é retreinar o modelo de base, mas sim mudar a interface de ação que o agente utiliza para chamar suas ferramentas de percepção. A equipe de pesquisa da NVIDIA identificou que o gargalo não estava na capacidade perceptiva dos VLMs, mas na forma como os agentes orquestravam e combinavam essas percepções para resolver problemas espaciais. A resposta? Tratar o código como a interface de ação, permitindo que o agente ‘programe’ suas próprias soluções em tempo real.
Como o Agente NVIDIA SpatialClaw Funciona: Código como Interface
No coração do SpatialClaw está um loop de agente que opera em torno de um kernel Python com estado. Este kernel é pré-carregado com quadros de entrada e um conjunto de primitivas. As ferramentas de percepção, que são a espinha dorsal de qualquer agente que lida com dados visuais, são simplesmente funções Python comuns (callables). Suas saídas – como máscaras de objetos, mapas de profundidade, geometria da câmera e trajetórias – são armazenadas como variáveis Python comuns. Isso permite uma flexibilidade e capacidade de composição sem precedentes.
O kernel do SpatialClaw expõe seis pontos de entrada públicos para o agente interagir:
InputImages: Armazena os quadros de vídeo ou imagens amostrados.Metadata: Contém informações como taxa de quadros, duração e índices de quadros.tools: Expõe primitivas de percepção e geometria.show(): Incorpora uma imagem no próximo contexto do agente.vlm: Envia consultas para uma sessão VLM separada.ReturnAnswer(): Submete a resposta final.
Duas ferramentas de percepção são cruciais para o sucesso do SpatialClaw:
tools.Reconstruct: Envolve o Depth Anything 3 e retorna a profundidade por quadro, intrínsecos e extrínsecos da câmera, e mapas de pontos densos. Essencial para a compreensão 3D.tools.SAM3: Baseado no SAM 3 (Segment Anything Model), produz máscaras de imagem ou vídeo a partir de prompts de texto, pontos ou caixas. Fundamental para a segmentação de objetos.
Além disso, o framework adiciona utilitários leves como tools.Geometry, tools.Mask, tools.Time, tools.Graph e tools.Draw. O aspecto mais impressionante é que tudo isso é training-free. O mesmo sistema de prompt, conjunto de ferramentas e hiperparâmetros são usados em todos os benchmarks e backbones testados, demonstrando a robustez da abordagem.
A Vantagem do Código como Interface de Ação no NVIDIA SpatialClaw
A pesquisa da NVIDIA estudou três interfaces de ação diferentes para resolver uma mesma questão: como medir a distância mais próxima entre um aquecedor e uma porta. Essa comparação ilustra perfeitamente por que a abordagem do SpatialClaw é tão superior:
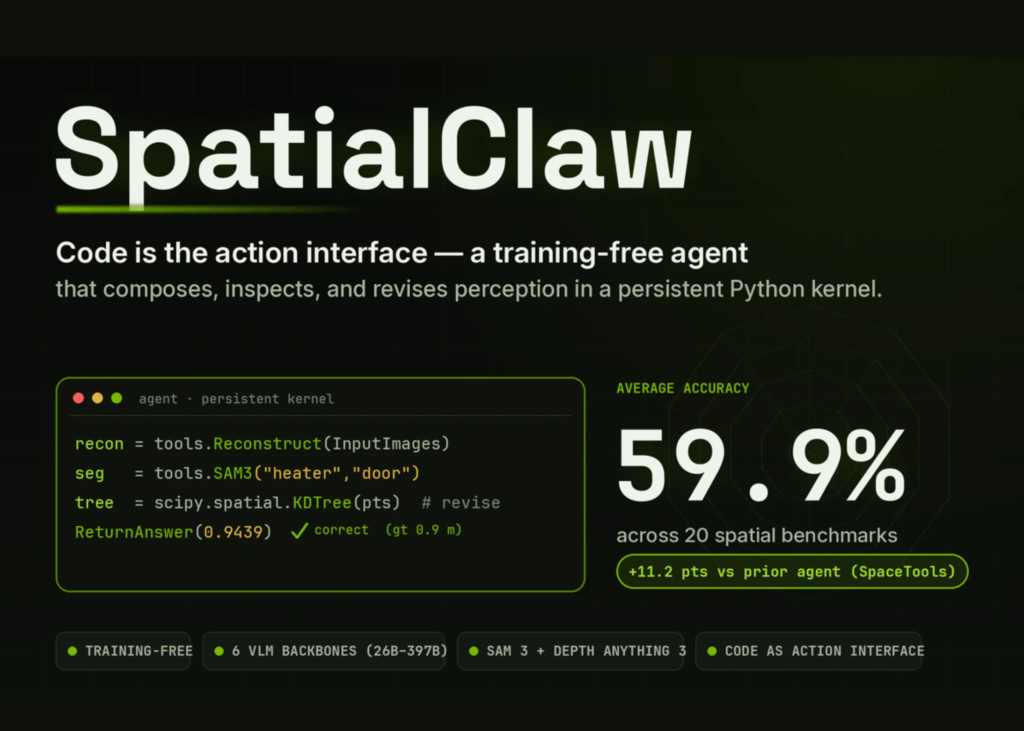
Código de Passagem Única (Single-pass code): Escreve um programa completo e o executa uma única vez. Se houver um erro de suposição inicial, ele se propaga para a resposta final, pois o agente não pode revisar intermediários.Chamada de Ferramenta Estruturada (Structured tool-call): Invoca ferramentas nomeadas através de um esquema JSON fixo. Isso limita a combinação livre de saídas com bibliotecas como NumPy ou SciPy, que são essenciais para computações complexas. Operações não pré-registradas (como encontrar o ponto mais próximo) resultam em erros.SpatialClaw (Código como Ação): Permite ao agente compor ferramentas em código, inspecionar os resultados intermediários e revisar sua estratégia. No exemplo do aquecedor, o agente primeiro calcula uma distância de centroide, percebe que o centroide usa uma mediana e então muda para scipy.spatial.KDTree para encontrar o verdadeiro ponto mais próximo, chegando a uma resposta de 0.9439 m contra uma verdade de 0.9 m. Essa capacidade de revisão e correção dinâmica é a chave.
Desempenho Revolucionário do NVIDIA SpatialClaw em Benchmarks
O SpatialClaw foi exaustivamente testado em 20 benchmarks, cobrindo cinco categorias que abrangem imagens únicas, múltiplas vistas, vídeo e compreensão geral de vídeo 4D. Ele demonstrou melhorias significativas em todos os seis backbones de modelos testados, que variam de 26 bilhões a 397 bilhões de parâmetros, incluindo as famílias Qwen3.5/3.6 e Gemma4.
Uma comparação controlada isolou o impacto da interface, mantendo o mesmo conjunto de ferramentas e prompt. Os resultados são claros:
No-tool baseline: 53.4% de precisão média.Single-pass code: 55.2% (+1.8 pontos vs. baseline).Structured tool-call: 56.7% (+3.3 pontos vs. baseline).SpatialClaw (code as action): 59.9% (+6.5 pontos vs. baseline).
Contra agentes espaciais anteriores usando o mesmo backbone Gemma4-31B, a diferença se alarga ainda mais:
VADAR (Single-pass): 40.5%pySpatial (Single-pass): 47.8%SpaceTools-Toolshed (Structured tool-call): 48.7%SpatialClaw (Code as action): 59.9% (melhor desempenho)
Os maiores ganhos foram observados em tarefas dinâmicas. No Gemma4-31B, o DSI-Bench subiu +17.6 pontos e o MindCube subiu +15.3 pontos. Essas categorias exigem computações geométricas encadeadas através de múltiplos quadros e pontos de vista, exatamente onde a flexibilidade do código do NVIDIA SpatialClaw brilha.
Por Dentro do Loop de Cinco Etapas do SpatialClaw para Raciocínio Espacial
Cada amostra de dados é processada por um loop de cinco etapas, garantindo que o agente possa refinar sua compreensão e resposta:
Planejamento: Um planejador inicial esboça uma estratégia sem visualizar as imagens.Geração de Código: O agente principal escreve uma célula Python por etapa.Execução de Código: Um verificador AST estático rejeita código inseguro antes da execução.Montagem de Feedback: Os resultados da execução são analisados.Submissão da Resposta: O loop se repete até que ReturnAnswer() seja chamado ou 30 etapas sejam excedidas.
O repositório oficial do SpatialClaw é executado em um fluxo de trabalho LangGraph e um kernel Jupyter persistente. Os backbones são servidos via vLLM, enquanto a percepção é gerenciada por um serviço FastAPI GPU. Para desenvolvedores interessados em experimentar, um quickstart permite rodar um benchmark em uma única máquina. Veja como começar:
git clone –recursive https://github.com/NVlabs/SpatialClaw.git
cd SpatialClaw
bash spatial_agent/scripts/setup.sh
cp .env.example .env # adicione suas chaves API, ou faça self-host do vLLM
python -m
Para aprofundar nos detalhes técnicos, você pode conferir o paper oficial do SpatialClaw.
Impacto e o Futuro do Raciocínio Espacial com o NVIDIA SpatialClaw
A introdução do NVIDIA SpatialClaw representa um avanço significativo não apenas para a pesquisa em IA, mas também para o desenvolvimento de aplicações práticas. Ao permitir que agentes de IA “programem” suas próprias interações com o mundo visual, abrem-se possibilidades em áreas como:
Robótica: Robôs poderão navegar e manipular objetos com maior precisão e adaptabilidade em ambientes não estruturados.Realidade Aumentada/Virtual: Experiências mais imersivas e interativas, com IA compreendendo o ambiente do usuário de forma mais contextualizada.Análise de Vídeo Inteligente: Melhor compreensão de cenas complexas, detecção de eventos e monitoramento mais eficaz.Veículos Autônomos: Sistemas de percepção mais robustos para tomadas de decisão em cenários dinâmicos.
Este desenvolvimento sublinha a importância de repensar as interfaces entre LLMs/VLMs e ferramentas externas. Não é apenas uma questão de ter as ferramentas certas, mas de como o agente pode usá-las de forma inteligente e adaptativa. A abordagem training-free do SpatialClaw também sugere um caminho para o desenvolvimento de sistemas de IA mais eficientes e menos intensivos em recursos de treinamento, um desafio crescente na era da IA em larga escala.
O próximo passo natural é ver como a comunidade de pesquisa e desenvolvimento irá capitalizar sobre essa inovação. Espera-se que o conceito de “código como interface de ação” seja explorado em outras áreas, impulsionando a próxima geração de agentes de IA capazes de raciocínio complexo e adaptação em tempo real. Para mais conteúdos sobre este tópico, confira nosso artigo sobre [LINK_INTERNO].
Conclusão
O NVIDIA SpatialClaw não é apenas mais uma ferramenta de IA; é uma mudança de paradigma na forma como os agentes de IA podem interagir e compreender o espaço tridimensional. Ao tratar o código como uma interface de ação, a NVIDIA demonstrou uma maneira eficaz de superar as limitações atuais dos VLMs no raciocínio espacial. Com desempenho superior e uma arquitetura flexível e sem treinamento, o SpatialClaw está preparado para impulsionar a próxima onda de inovações em IA, tornando sistemas inteligentes mais autônomos e capazes de interagir de forma significativa com o mundo real.
FAQ: Perguntas Frequentes sobre o NVIDIA SpatialClaw
O que é o NVIDIA SpatialClaw?
É um framework training-free da NVIDIA Research que capacita agentes de IA, especialmente modelos de visão-linguagem (VLMs), a realizar raciocínio espacial avançado usando código Python como sua interface de ação. Ele melhora a capacidade dos VLMs de compreender a localização, relações e movimento de objetos em 3D.
Por que o SpatialClaw é 'training-free'?
Ele é ‘training-free’ porque não requer o retreinamento dos modelos de base (VLMs ou ferramentas de percepção). Em vez disso, ele otimiza a forma como o agente orquestra e combina as saídas dessas ferramentas através da geração de código dinâmico. O mesmo sistema de prompt, conjunto de ferramentas e hiperparâmetros são usados em todos os testes, tornando-o altamente eficiente e adaptável.
Qual a principal inovação do NVIDIA SpatialClaw?
Sua principal inovação é usar código como a interface de ação. Isso permite que o agente não apenas invoque ferramentas de percepção, mas também combine suas saídas de forma flexível usando bibliotecas Python (como NumPy e SciPy), inspecione resultados intermediários e revise sua estratégia em um loop de cinco etapas. Essa capacidade de raciocínio e adaptação em tempo real supera as abordagens de passagem única ou chamadas de ferramentas estruturadas.
Gostou da notícia?
Inscreva-se na nossa newsletter e receba as principais novidades sobre inteligência artificial diretamente no seu e-mail.
Fonte: https://www.marktechpost.com





